신뢰도 예측 기반 신뢰도 성장 관리 : 감시체계 사례
Reliability Prediction Based Reliability Growth Management : Case Study of Surveillance System
Article information
Trans Abstract
Purpose
In this study, a reliability prediction based reliability growth management is suggested especially for the early development phase of a system and the case study of surveillance system is given.
Methods
The proposed reliability prediction based reliability growth management procedures consists of 7 Steps. In Step 1, the stages for reliability growth management are classified according to the major design changes. From Step 2 to Step 5, system reliability is predicted based on reliability structures and the predicted reliabilities of subsystems (Level 2) and modules (Level 3). At each stage, by comparing the predicted system reliability with that of the previous stage, the reliability growth of the system is checked in Step 6. In Step 7, when the predicted value of sustem reliability does not satisfy the reliability goal, some design alternatives are considered and suggested to improve the system reliability.
Results
The proposed reliability prediction based reliability growth management can be an efficient alternative for managing reliability growth of a system in its early development phase. The case study shows that it is applicable to weapon system such as a surveillance system.
Conclusion
In this study, the procedures for a reliability prediction based reliability growth management are proposed to satisfy the reliability goal of the system efficiently. And it is expected that the use of the proposed procedures would reduce, in the test and evaluation phase, the number of corrective actions and its cost as well.
1. 서 론
최근 개발된 무기체계는 과거보다 많은 기능을 포함하고 있으며 복잡한 체계 구성을 가지고 있다. 이에 따라 체계의 고장 발생이 늘어나게 되고 이는 무기체계 개발 이후 해당 무기체계가 야전 배치되었을 때 실현되는 운용 신뢰도가 만족스럽지 못한 경우가 많이 발생하는 이유이기도 하다. 이러한 문제를 무기체계의 야전 배치 이전에 해결하기 위해 신뢰도 성장 관리가 많이 사용되고 있으며, MIL-HDBK-189C(U.S. DoD, 2011)는 신뢰도 성장 관리를 위한 대표적인 프로그램으로 신뢰성 시험 기반의 신뢰도 성장 관리 방안과 다양한 신뢰도 성장 모형을 제시하고 있다. 신뢰도 성장 관리를 위해 많이 사용되는 신뢰도 성장 모형으로 Duane 모형(Duane, 1964)과 Crow-AMSAA 모형(Crow, 1975)이 있으며, MIL-HDBK-189C에서는 Crow-AMSAA(Army Materiel Systems Analysis Activity) 모형을 기반으로 계획(Planning), 추적(Tracking), 예측(Projection) 모형으로 구분하고 있다.
대부분의 무기체계 신뢰도 성장 관리는 개발 시험(DT, Developmental Test)과 운용 시험(OT, Operational Test) 단계에서 체계 단위 시험을 실시하고 MIL-HDBK-189C의 신뢰도 성장 모형을 이용하여 수행되어진다. 현재까지 국내외에서 MIL- HDBK-189C의 모형을 바탕으로 많은 연구가 이루어지고 있으며, 체계 개발 초기 단계에서의 연구(체계 신뢰도 성장 계획)와 시험 평가 단계에서의 연구(체계 신뢰도 평가 및 추적)로 구분해 볼 수 있다. MIL-HDBK-189C의 모형을 활용한 신뢰도 성장 관리 관련 연구 중 체계 개발 초기 단계에서의 연구를 살펴보면 다음과 같다. Kumaraswamy(2002)는 소형 헬기의 시제품을 개발하는 과정에서 Duane 모형을 적용하여 시스템의 신뢰도를 추정하고 신뢰도 성장을 관리하는 사례 연구를 수행하였다. Jung(2005)은 철도 차량에 대한 신뢰도 성장관리를 위하여 제품 개발 기간 동안 고장발견과 시정조치, 그리고 신뢰도 목표 달성 사이의 관계를 보여주는 신뢰도 성장 관리에 대하여 설명하고 AMSAA 모형을 실용적으로 활용할 수 있는 방안을 제시하였다. So et al.(2013)은 건설 장비에 대한 신뢰도 관리 프로세스를 개발하고 신뢰도 성장 시험 계획의 수립 방법과 절차를 제시하였다. Cho et al.(2017)은 AMSAA Crow Planning 모형과 Crow-AMSAA 모형을 이용하여 하이브리드 DC-DC 컨버터의 신뢰도 성장 관리를 수행하였고, Seo et al.(2018)은 대O유도무기 체계의 부체계를 대상으로 Planning Model Based on Projection Methodology-Continuous 모델을 이용하여 신뢰도 성장 계획을 수립하고 관련된 파라미터들에 대해 민감도 분석을 수행하였다.
시험 평가 단계에서의 신뢰도 성장 관리 관련 주요 연구는 아래와 같다. Lee et al.(2005)은 KRRI(Korea Railroad Research Institute)에서 개발한 무인 운전 고무차륜 K-AGT(Korea-Automated Guideway Transit) 시스템의 주행시험 자료를 AMSAA모형에 적용 및 분석하였다. Choi et al.(2006)은 한국형 고속열차 차량시스템에 대해 Duane모형을 적용하여 MKBF(Mean Kilometers Between Failure) 및 성장률을 추정하였다. Lee et al.(2010)은 KA-1 항공기의 운영 자료를 바탕으로 Duane 모형과 Crow-AMSAA 모형을 이용하여 KA-1 항공기의 신뢰도 성장을 분석한 사례를 보였다. Chung et al.(2012)는 K계열 무기체계의 야전 고장데이터를 수집하여 신뢰도 성장 모형에 적용함으로 무기체계 및 하위 구성품에 대한 신뢰도를 추정하는 문제를 다루었다. Kim et al.(2014)는 일회성 체계(One-Shot System)의 FAT(Factory Acceptance Test), DT/OT에서의 고장 횟수를 바탕으로 Crow-AMSAA 이산형 모형을 적용하여 신뢰도 및 성장률 등을 추정하였다. Khanh et al.(2015)은 로켓엔진을 대상으로 개발 시험에 적용하는 새로운 신뢰도 성장 모형을 제안하고, 다양한 운용 제약 조건하에서 로켓엔진의 신뢰도를 추정하여 기존의 방법과 비교하였다. Crow(2015)는 실제 시험 데이터와 시험에서 주어진 예측 기댓값을 기반으로 하여 미래의 모든 시험 단계에 걸쳐 계획된 신뢰도 성장 곡선을 지속적으로 갱신하는 방법을 제안하였다. Lee et al.(2015)은 무기체계 신뢰성 보증 방안 프로세스 가운데 기동장비의 신뢰도 성장관리에 대한 방안을 제시하였고, Lee et al.(2016)은 Crow-AMSAA 모형을 이용하여 K-000(장갑차)의 신뢰도 성장 관리의 사례 연구를 수행하였다. Zhang et al.(2017)은 자동차 연간 수리 횟수를 기반으로 한 신뢰도 성장 모형으로 Crow-AMSAA 모형의 변형된 신뢰도 성장 관리 모형을 제시하고, 제시한 모형이 실제 자동차 브랜드별 고장 수리 데이터를 잘 설명함을 사례 연구를 통해 보였다.
MIL-HDBK-189C에서 제시하는 일반적인 신뢰도 성장 관리는 신뢰도 평가를 기반으로 하는 접근 방식(Assessment Approach) 으로 Figure 1과 같이 체계 단위 신뢰성 시험을 통해 체계 신뢰도를 평가하고, 고장 정보를 수집한 뒤 고장에 대한 근본 원인을 파악 및 분석하여 시정조치(Corrective Action)를 취하는 일련의 프로세스를 통해 무기체계의 신뢰도 성장을 관리한다.
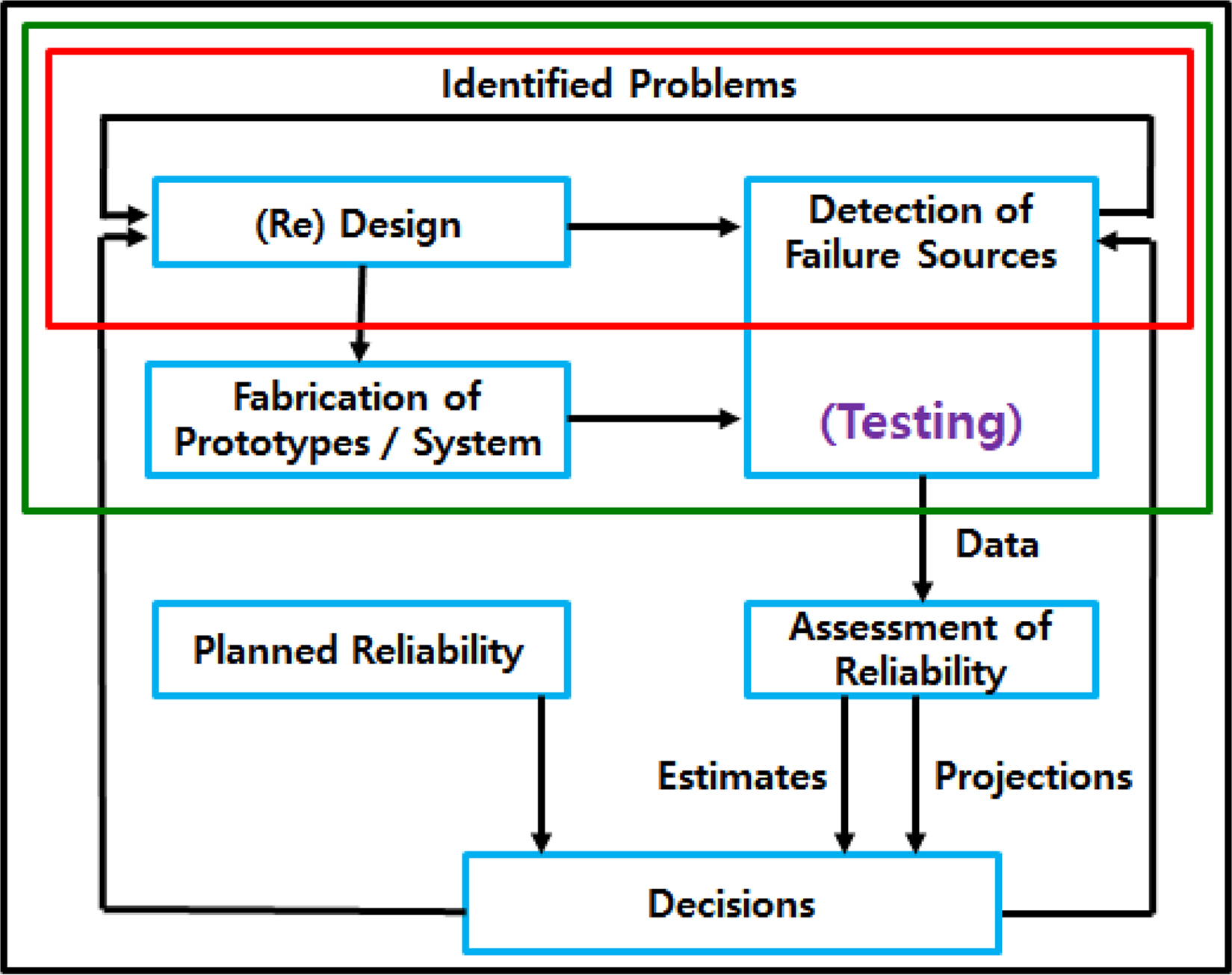
Reliability Growth Management Process of MIL-HDBK-189C (Assessment Approach)
무기체계의 경우 DT/OT 단계를 중심으로 개선 활동을 통해 체계 단위의 신뢰도 성장 관리가 수행된다. 그러나 우리나라 무기체계 개발의 경우 DT/OT 단계에서 충분한 수의 시제품을 대상으로 시험 및 평가가 이루어지기 어려운 환경이며 이로 인해 체계의 고장 식별 및 시정조치가 미흡할 수밖에 없다. 이는 해당 무기체계의 야전 운용 신뢰도를 낮아지게 하는 주요 원인 중 하나이다. 따라서 우리나라의 경우 DT/OT 단계 이전 초기 개발 단계부터 체계 신뢰도를 확인하고 각 단계 별로 요구되는 신뢰도 목표 값 만족과 신뢰도 성장 여부를 확인하는 것이 비용 효과 측면에서 효율적이라 판단된다. 그러나 무기체계의 초기 개발 단계에서는 체계 단위의 시제품이 제작되지 않기 때문에 체계 단위에서 시험 평가 기반의 신뢰도 성장 관리를 적용하기에는 어려운 점이 있다. 현재 무기 체계 개발 단계에서 부체계나 모듈 또는 하위 단위에서 일부 신뢰성 시험을 통해 부분적인 신뢰도 검증이 이루어지고 있지만 체계 단위에서는 현실적으로 가능하지 않다.
이 연구에서는 이에 대한 대안으로 무기체계의 개발 단계에서 체계의 설계를 기반으로 체계 신뢰도를 예측하여 신뢰도 성장 관리를 수행하는 방안을 제시하였는데, 이는 무기체계에 대한 신뢰도 예측을 기반으로 단계 별로 신뢰도 비교를 통해 신뢰도 성장 관리를 수행하는 방법이다. Moon et al.(2017)이 신뢰도 예측을 이용한 무기체계 신뢰도 성장 관리에 대한 연구를 수행하였으나 이는 체계 단위의 신뢰도 예측에 기반한 신뢰도 성장 관리가 아니라 부품 단위에서 신뢰도 예측 규격의 올바른 적용을 통한 신뢰도 성장 문제를 다루고 있다. 실제로 우리나라 무기체계 개발 초기 단계에서 보통 RAM 분석 보고서를 작성하지만 그 이후 지속적인 개정이 이루어지는 경우가 많지 않으며, 특히 RAM 분석 결과를 바탕으로 체계 전체에 대한 신뢰도 취약 아이템을 확인하고 개선 조치를 수행하는 신뢰도 성장관리 활동을 하는 경우는 드물다. 그러나 이 연구에서 제시하는 신뢰도 예측 기반 신뢰도 성장 관리 방안은 현실적으로 적용 가능할 뿐 아니라 체계 개발 단계에서 체계의 신뢰도 수준을 단계 별로 비교 평가를 통해 체계의 신뢰도 성장 관리를 가능케 한다. 이 연구의 구체적인 내용은, 2장의 무기체계의 신뢰도 예측 기반 신뢰도 성장 관리 방안과 3장의 신뢰도 예측 기반 신뢰도 성장 관리 방안의 감시체계 실제 적용 사례, 그리고 4장의 결론과 향후 연구 계획으로 구성되어 있다.
2. 신뢰도 예측 기반 신뢰도 성장 관리 방안
MIL-HDBK-189C에서 정의하고 있는 신뢰도 성장 관리는 기본적으로 DT/OT 단계에서 시험을 통해 고장 정보를 수집하고 고장에 대한 근본 원인을 파악 및 분석하여 시정조치를 취하는 일련의 프로세스를 반복하여 체계 신뢰도 성장을 수행하는 것을 기본으로 한다. 무기체계의 경우 체계 개발 단계에서는 모듈 단위 및 하위 단위에서 부분적으로 신뢰성 시험이 가능하지만 시제품이 제작되기 전이기 때문에 체계 단위에 대한 신뢰성 시험 기반의 신뢰도 성장 관리를 수행하기는 어렵다. 따라서 개발 단계에서는 체계 신뢰도 예측에 기반한 신뢰도 성장 관리 방안이 대안으로 활용될 수 있다. 이 연구에서 제시하는 신뢰도 예측 기반의 신뢰도 성장 관리 절차는 다음과 같다.
Step 1 : 체계 개발 단계에서 주요 설계 검토 단계나 설계 변경 시점에 따라 Stage(단계)를 구분한다. Initial Stage는 일반적으로 PDR(Preliminary Design Review) 이전의 시점을 기준으로 정하며, 이후 CDR(Critical Design Review)과 같이 주요한 설계 검토 단계를 기준으로 필요에 따라 Stage를 추가하면서 Stage별로 체계에 대한 신뢰도 예측을 수행한다.
Step 2 : 각 Stage에서 가용한 정보를 바탕으로 해당 시점의 설계를 기준으로 체계를 구성하는 아이템들의 신뢰도 구조를 파악한다. 이 때 대상 체계의 수준을 Level 1 체계 수준, Level 2 부체계 수준, 그리고 Level 3의 모듈 수준으로 구분한다. Level 3 모듈의 구성은 하위 구조를 포함하여 모두 직렬 구조를 가정하며 Level 2의 부체계를 구성하는 모듈들의 신뢰도 구조는 실제 설계상의 구조를 그대로 반영한다. Level 4 이하 수준을 구성하는 아이템들은 모두 직렬구조를 가정한다.
Step 3 : 부체계를 구성하는 개별 모듈의 신뢰도 예측은, 모듈을 구성하는 아이템들의 목록을 작성하고 해당 아이템들의 정보들을 수집한 뒤 MIL-HDBK-217F(U.S. DoD, 1995) 또는 Telcordia SR-332(Telcordia, 2011)와 같은 신뢰도 예측 규격을 사용하여 각 아이템에 적합한 운용 환경을 설정하고 예측한 아이템들의 신뢰도 예측 값을 이용한다. 이 때 아이템들의 고장 시간은 지수분포를 따르며 모듈의 신뢰도 구조가 직렬 구조라고 가정한다. 만일 모듈을 구성하는 아이템들의 신뢰도 구조가 알려져서 이를 반영할 수 있다면 실제 신뢰도 구조를 바탕으로 모듈에 대한 신뢰도 예측을 수행할 수 있다.
Step 4 : 부체계에 대한 신뢰도 예측의 경우 부체계를 구성하는 모듈들의 목록과 신뢰도 예측 값 리스트를 작성한 뒤, 부체계에 대한 신뢰도 블록 다이어그램 (Reliability Block Diagram)을 작성하고 Step 3에서 구한 모듈 신뢰도 예측 값을 입력하여 부체계의 신뢰도를 예측한다. 체계 신뢰도 예측에 관한 기존의 RAM 분석 보고서의 경우 부체계를 구성하는 모듈도 직렬구조를 한다는 가정 하에 체계 신뢰도 예측을 많이 하는데 실제 체계 신뢰도 예측에서 모듈들의 신뢰도 구조에 따라 상당한 예측 값의 차이가 발생하기도 한다. 따라서 이 연구에서는 부체계를 구성하는 모듈들의 신뢰도 구조를 정확히 반영하여 부체계의 신뢰도 예측을 수행하는 방안을 고려하였다. 실제로 부체계의 신뢰도 구조는 복잡한 경우가 대부분이며 복잡한 신뢰도 구조에 대한 신뢰도 예측을 위하여 BlockSim과 같은 상용 소프트웨어를 활용한다.
Step 5 : 체계는 많은 경우 부체계들의 직렬구조로 이루어진 신뢰도 구조를 갖는다. 체계에 대한 신뢰도 예측 역시 부체계의 경우와 마찬가지로 체계를 구성하는 부체계 목록과 신뢰도 예측 값을 작성하고, 체계의 신뢰도 블록 다이어그램을 작성한 뒤 부체계 신뢰도 예측 값을 입력하여 체계 신뢰도를 예측한다.
Step 6 : Step 5에서 구한 체계에 대한 신뢰도 예측 값을 이용하여 이전 Stage의 신뢰도 예측 값 대비 신뢰도 성장 여부와 고객의 요구사항으로 주어진 체계 신뢰도 목표 값에 대한 만족 여부를 확인한다. 체계 개발 초기 단계에는 신뢰도 목표 값이 확정이 안된 상태에서 잠정 신뢰도 목표 값을 사용하는 경우가 있으며 이런 경우에는 개발이 진행됨에 따라 이후 Stage에서 체계에 대한 최종 신뢰도 목표 값이 결정되게 되며 신뢰도 성장 관리는 최종 신뢰도 목표 값을 기준으로 진행된다.
Step 7 : Step 6에서 체계 신뢰도 성장 여부와 체계 신뢰도 목표 값 만족 여부를 확인하고 신뢰도 개선이 필요한 경우 체계 개발 또는 설계팀으로 신뢰도 개선을 위한 방안을 피드백하게 된다. 체계에 대한 신뢰도 예측 값이 목표신뢰도에 못미치는 경우 부체계에 대한 신뢰도 할당을 통해 신뢰도 개선 우선순위를 제시하고 추후 설계 변경 대안이 제출되면 그에 대한 신뢰도 예측을 다시 수행하여 신뢰도 관점에서 만족 여부를 확인한다. 부체계에 대한 신뢰도 할당은 Mettas(2000)가 제안한 비용 함수를 이용한 신뢰도 할당 모형을 적용하며 최적화 모형은 다음과 같다.
여기서 제시한 비용과 신뢰도의 관계를 나타내는 비용 함수는 다음과 같다.
n : 부체계 수
RS : 체계의 신뢰도
RG : 체계의 목표 신뢰도
fi : i번째 부체계의 신뢰도를 증가시키기 어려운 정도를 나타내는 지표
Ri, min : i번째 부체계의 최소 신뢰도
Ri, max : i번째 부체계의 달성 가능한 최대 신뢰도
비용 함수에서 Feasibility를 나타내는 fi는 다른 모듈에 비해 i번째 부체계의 신뢰도를 증가시키기 어려운 정도를 나타내며 0과 1사이의 값을 갖는다. fi가 0에 가까울수록 신뢰도를 증가시키는 것이 어려우며, 1에 가까울수록 비교적 쉽게 신뢰도를 증가시킬 수 있다. fi값은 SV(Scale Values)를 통해 다음과 같이 계산된다.
이 때 SV는 Easy (0.1) ~ Hard (9.9) 범위에서 i번째 부체계의 특성에 따라 선택하는 값이며, 각 부체계들의 신뢰도 중요도(Reliability Importance)의 10배 값을 이용하였다. 신뢰도 중요도는 Birnbaum Measure(Birnbaum, 1969)를 사용하였고 i번째 부체계에 대한 신뢰도 중요도 (IRi)는 다음과 같이 계산된다. 신뢰도 중요도의 경우 다른 측도를 사용할 수 있으나 체계가 직렬구조로 구성되어 있는 경우에는 Birnbaum Measure를 사용하여도 무리가 없다고 알려져 있다. (Henley et al., 1981)
RS : 체계의 신뢰도
Ri: i번째 부체계의 신뢰도
이와 같이 체계 개발 단계에서 주요 설계 단계나 설계 변경 Stage별로 Step 1 ~ Step 7을 반복적으로 수행하여 신뢰도 예측 기반의 체계 신뢰도 성장을 관리하게 된다.
3. 신뢰도 예측 기반 신뢰도 성장 관리 감시체계 적용 사례
감시체계는 주변 해역에 음향탐지기를 비롯한 센서를 해저, 수중, 육상에 설치하여 수상이나 수중으로 접근하는 물체를 식별 및 추적하는 감시정찰 체계이다. 감시체계는 GBL(General Breakdown List)을 기준으로 체계, 부체계, 모듈 등으로 구분할 수 있으며, 총 50개의 부체계로 구성되어 있다. 감시체계는 크게 신호를 감지하는 장치(A센서~E센서), 감지된 신호를 처리하는 장치(처리장치1~5, 연동장치1~6), 신호를 전송해주는 장치(교환장치1~4, 무선장치1~6), 처리된 신호를 확인하고 감시체계를 조작할 수 있는 장치(컴퓨터1~8, 분배기, 프린터, 모니터)로 구분된다. 2장에서 제시한 신뢰도 예측 기반 신뢰도 성장 관리 방안에 따라 감시체계 개발 단계에서 수행한 신뢰도 성장관리 분석 결과는 다음과 같다.
3.1 설계 변경에 따른 감시체계의 Stage 구분
감시체계 개발 단계는 PDR (00년 00월), CDR (00년 00월)을 포함한 주요 설계 변경 시점을 기준으로 Table 1과 같이 6단계(Initial Stage ~ Stage 5)로 구분된다. Initial Stage는 PDR 이전까지 설계를 기준으로 하였으며, 유사장비 고장률 데이터를 활용하여 감시체계의 신뢰도 구조가 직렬 구조인 경우를 가정하여 체계 신뢰도를 예측하였다. PDR 단계의 설계 기준을 Stage 1, CDR 단계의 설계 기준을 Stage 2, CDR 단계 이후 설계도면 1차 최신화 단계를 Stage 3, CDR 단계 이후 설계도면 2차 최신화 단계를 Stage 4, FAT 단계의 설계 기준을 Stage 5로 구분하였다.

Stage Classification according to Major Design Changes
3.2 신뢰도 예측 기반 감시체계 신뢰도 성장 관리 분석 결과
신뢰도 예측 기반 감시체계 신뢰도 성장 관리 분석을 위해 필요한 감시체계의 신뢰도 목표 값은 Initial Stage부터 Stage 3까지는 유사체계 고장 정비데이터를 통해 산출한 잠정 신뢰도 목표 값을 기준하였으며, Stage 4부터는 감시체계의 OMS/MP(Operational Mode Summary/Mission Profile)와 감시체계에 필요한 사항들을 고려하여 개정된 신뢰도 목표 값을 기준으로 하였다. 각 Stage 별 신뢰도 예측 기반 감시체계 신뢰도 성장 관리 분석 결과를 종합하면 Figure 2와 같다.
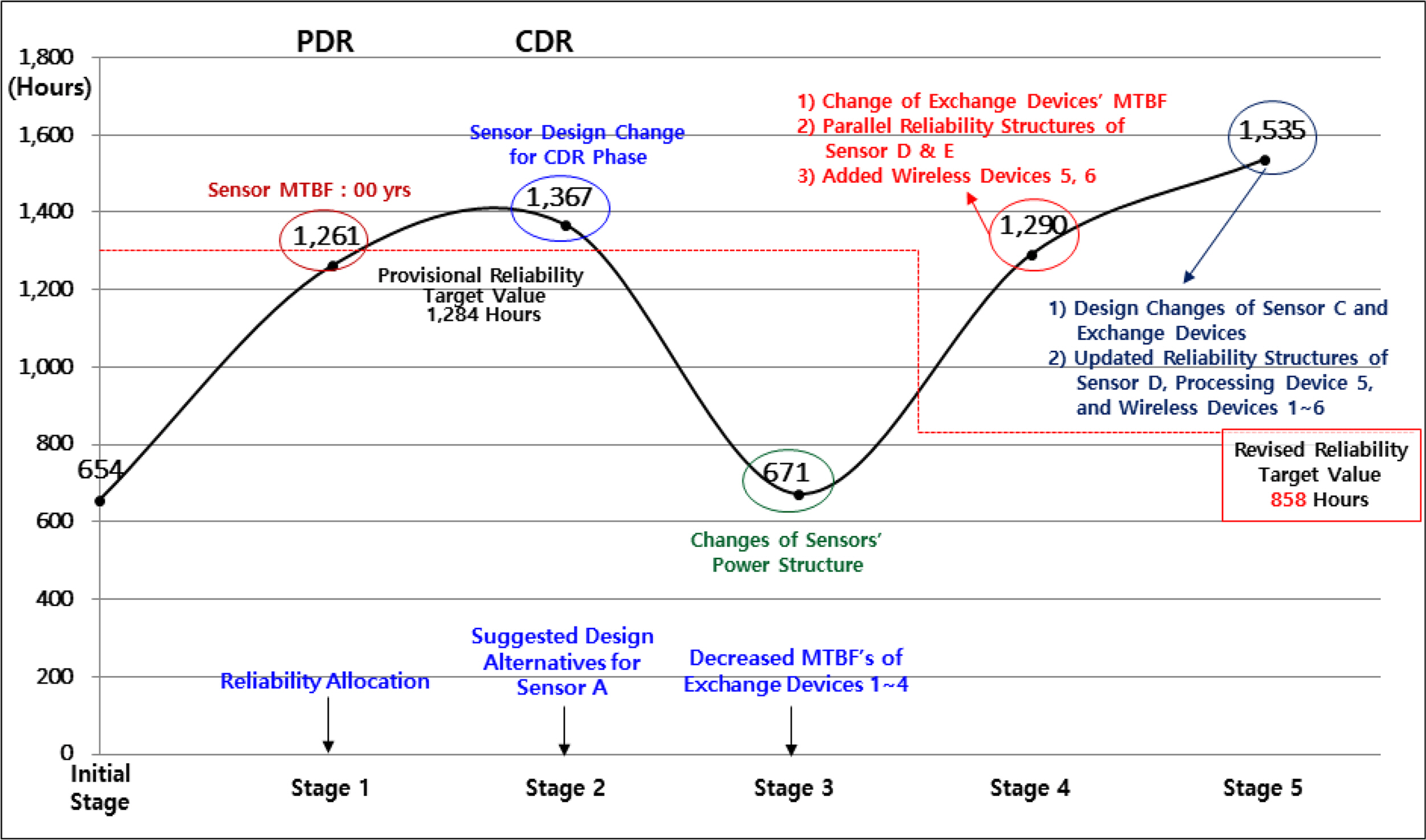
Reliability Growth Analysis of Surveillance System
Figure 2는 감시체계의 주요 설계 변경 시점을 기준으로 구분한 Stage별로 예측한 체계의 신뢰도 값의 변화를 나타내며 각 Stage별로 신뢰도 예측 관련 주요 이슈들을 보여준다. 이 사례 연구에서 다루는 감시체계는 무기체계의 일종이지만 대부분 상용 전자 장비로 구성되어 있으므로, 민간 전자 장비 신뢰도 예측 규격인 Telcordia SR-332를 신뢰도 예측 규격으로 사용하였다. 모듈의 신뢰도 예측은 모듈의 신뢰도 구조가 직렬 구조, 구성품의 수명분포는 지수분포라는 가정 하에 WQS(Windchill Quality Solutions) 소프트웨어를 사용하여 분석하였다. 체계 및 부체계의 신뢰도 블록 다이어그램 작성과 신뢰도 예측은 BlockSim 소프트웨어를 이용하였고, 신뢰도 지표로는 MTBF (Mean Time Between Failures)를 사용하였다.
3.2.1 잠정 신뢰도 목표 값 기준 감시체계 신뢰도 성장 관리 (Initial Stage ~ Stage 3)
감시체계 신뢰도 성장 관리의 Initial Stage는 개발 초기 PDR 단계 이전 단계를 의미한다. 감시체계를 구성하는 아이템 및 구조가 정해지기 이전이므로, 부품 및 모듈, 부체계들의 수명 분포는 지수분포를 따르고 체계 신뢰도 구조는 모두 직렬 구조라는 가정을 바탕으로 감시체계의 신뢰도를 예측하였다. 50개의 부체계로 구성된 감시체계 최종설계안과 달리 Initial Stage에서는 부체계가 16개로 구성되어 있으며 이 때 감시체계의 MTBF 예측 값은 654시간이다.
Stage 1은 PDR 단계를 기준으로 구분하였으며 PDR에서 정해진 설계 안을 반영하였다. 감시체계를 구성하는 센서들의 경우 구체적인 설계 안이 준비되지 못하고 ROC(Required Operational Capability)의 신뢰도 요구사항이 'MTBF 00년 이상'으로 주어졌기 때문에 Stage 1에서 센서의 신뢰도 예측 값은 ROC에 명기된 MTBF 값을 우선 적용하였다. Stage 1의 추가 설계 사항으로는 부체계인 처리장치1에 대한 신뢰도 구조로 병렬 구조, 병-직렬 구조, 처리장치2와 3에는 병렬 구조가 각각 적용되었다. Stage 1에서 감시체계의 MTBF는 1,261시간으로 예측되었으며, BlockSim 소프트웨어를 이용하여 모수 값 μ=7.1456, σ=0.9954, λ=1.0074인 Generalized Gamma 분포가 가장 적합한 분포로 추정되었다.
Stage 1에서 감시체계에 대한 신뢰도 예측 값이 유사체계의 고장 정비데이터를 통해 도출한 잠정 신뢰도 목표값 1,284시간을 만족하지 못하므로 이를 만족하기 위한 신뢰도 할당을 수행하였다. 앞의 2장의 Step 7에서 제안한 비용 함수를 이용한 신뢰도 할당 모형을 적용하였으며 이를 위해 감시체계 부체계들의 fi 값은 Table 2와 같다. Table 2의 부체계는 센서 그룹과 컴퓨터로 나뉘어 있으며 각 센서 그룹은 괄호 안의 숫자에 해당하는 개수의 부체계가 직렬로 구성되어 있다.

Feasibility Indices of Subsystems
Stage 1에서 감시체계의 고장 분포는 Generalized Gamma 분포로 추정되었으나, 모수인 σ와 λ가 1에 가까운 값을 가지므로 실제로 지수분포에 가까운 분포를 따르게 된다. 감시체계의 잠정 신뢰도 목표 값이 1,284시간이므로 감시체계의 고장 분포가 지수분포를 따르는 경우 MTBF=1,284시간에서 체계 신뢰도 0.3680을 만족해야 한다. Ri, min은 i번째 부체계의 현재 신뢰도를 적용하였으며, Ri, max는 달성 가능한 최대 신뢰도이므로 0.9999를 적용하였다. 이를 바탕으로 부체계에 대해 신뢰도 할당을 수행한 결과, 컴퓨터1~4의 MTBF가 각각 현재 8,283시간에서 8,490시간으로 개선이 필요한 것으로 확인되었다. 따라서 신뢰도 할당 결과를 바탕으로 컴퓨터1~4에 대한 신뢰도 개선을 제안하였고, 이후 Stage에서 설계 변경을 통해 컴퓨터의 MTBF가 13,999시간으로 Stage 1보다 크게 향상되었으며 신뢰도 구조도 병렬 구조가 반영되었다.
Stage 2에서는 CDR 단계 기준의 도면 및 설계 현황을 반영하였다. 컴퓨터1~4의 신뢰도 구조는 병렬 구조로 식별되었으며, 센서들에 대해서는 실제 상세 설계 기준으로 예측된 신뢰도 값을 적용하였다. 처리장치1, 2는 센서(A센서, B센서, C센서)를 통해 수신되는 신호를 할당하는 기능별로 구분하였다. 그리고 부체계 단위에서 무선장치 등, 모듈 단위에서 S조립체 등이 추가되었다. 신뢰도 블록 다이어그램을 바탕으로 Stage 2에서의 신뢰도 예측 결과는 MTBF가 1,367시간으로 예측되었다. BlockSim 소프트웨어를 이용하여 감시체계에 대한 고장 분포를 추정하면, 모수 μ=7.2313, σ=0.9924, λ=1.0134인 Generalized Gamma 분포를 따르는 것을 확인할 수 있다. 감시체계의 경우 ROC에 센서에 대한 신뢰도 요구사항이 있으므로 이를 만족하기 위해 Stage 2에서는 A센서에 대한 신뢰도 개선을 위한 설계 대안 5가지를 제시하였다. 설계 대안은 기존 설계 안에서 신뢰도 구조 변경을 제안하였으며, 설계 대안 1은 센서 모듈 1차 전원의 병렬 구조, 설계 대안 2는 센서 모듈 1차 전원 12개의 Cold Standby 구조, 설계 대안 3은 센서 모듈의 병렬 구조, 설계 대안 4는 센서 모듈 1차 전원 병렬 구조와 센서 모듈의 병렬 구조, 설계 대안 5는 센서 모듈 1차 전원 12개의 Cold Standby 구조와 센서 모듈의 병렬 구조이다. 제시한 설계 대안 5가지 중 설계 대안 1이 실제 A센서 뿐 아니라 B센서 설계에도 반영되었으며, C센서의 경우에는 센서 모듈 1차 전원의 구조가 4 중 3 구조로 변경되었다.
Stage 3에서는 CDR 단계 이후 설계도면 1차 최신화 현황을 반영하였다. 센서들의 전원 망, 수량 및 신뢰도 구조가 변경되었고, 장비들의 설계 최신화에 따라 신뢰도 예측 값이 최신화 되었다. 특히 교환장치의 신뢰도 예측 값이 1,560,730시간(Stage 2)에서 4,007시간(Stage 3)으로 크게 감소하였다. 그리고 센서들의 케이블, G장치 등이 추가되었다. Stage 3에서 감시체계의 MTBF는 671시간으로 예측되었으며 이 경우 잠정 신뢰도 목표 값 1,284시간을 만족하지 못함을 알 수 있다. 그 이유로는 교환장치의 신뢰도 예측 값이 이전 Stage에 비해 크게 감소함에 따라 감시체계 신뢰도 감소에 큰 영향을 주었기 때문이다. Stage 3에서 교환장치의 설계가 구체화 되지 않아 기존 유사장비 MTBF를 활용하여 교환장치의 MTBF가 낮게 적용되었으나 이후 Stage에서 상세 설계 사항 반영 후 교환장치의 MTBF가 크게 개선됨을 확인하였다.
3.2.2 최종 신뢰도 목표 값 기준 감시체계 신뢰도 성장 관리 (Stage 4 ~ Stage 5)
감시체계 신뢰도 성장 관리 Stage 4에서는 CDR 단계 이후 설계도면 2차 최신화 현황을 반영하였으며 이 때 OMS/MP 기준 감시체계에 대한 최종 신뢰도 목표 값이 858시간으로 설정되었다. 부체계 단위에서 H연동기의 수량이 변경되었으며 모니터, 무선장치 5, 6이 추가되었고 D센서, E센서의 신뢰도 구조가 병렬 구조로 변경되었다. 또한 모듈 단위에서 설계 변경 및 최신화에 따라 모듈들의 신뢰도 예측 값이 변경되었으며, 처리장치1의 제어기가 처리장치2로 이동하였다. 기타 보조 장비들 중에서 I장비는 삭제, 교환장치에 J장비가 추가되었으며 각 모듈에 K장비가 추가되었다. Stage 4에서 감시체계 MTBF는 1,290시간으로 예측되었으며 최종 확정된 신뢰도 목표 값 858시간을 만족하는 것을 알 수 있다. 또한 이전 Stage에서 예측된 MTBF 671시간보다 크게 상승하였는데, 가장 큰 이유는 교환장치의 설계가 변경됨에 따라 교환장치의 MTBF가 4,007시간에서 32,643시간(교환장치1), 300,841시간(교환장치 2), 1,000,000시간(교환장치3), 121,183시간(교환장치4)으로 각각 크게 상승하였기 때문이다.
Stage 5에서는 FAT 단계의 설계도면 현황을 반영하였으며 부체계 단위에서 D센서, 처리장치5의 신뢰도 구조 최신화, C센서 변경 사항이 반영되었다. 그리고 교환장치, 무선장치 등 하부 구성품들의 설계가 최신화되었으며, 무선장치 1~6의 신뢰도 구조가 병렬 구조에서 복합 구조로 변경되었다. Stage 5에서 감시체계의 MTBF는 1,535시간으로 예측되었다.
4. 결 론
이 연구에서는 체계에 대한 시험 평가를 실시하기 이전 체계의 개발 단계에서 적용할 수 있는 신뢰도 예측 기반 신뢰도 성장 관리 방안을 제시하고 감시체계에 실제 적용한 사례를 다루었다. 이 연구에서 제시한 신뢰도 예측 기반 신뢰도 성장 관리 방안은 체계에 대한 시험 평가 이전의 주요 설계 단계나 설계 변경 시점을 중심으로 단계를 구분하고 가용한 정보를 활용하여 단계 별로 체계 신뢰도를 예측하여 이를 기반으로 체계 신뢰도 성장 관리를 수행하는 것이다. 체계 신뢰도 예측은 부품 단위의 고장률 정보와 체계의 신뢰도 구조를 기반으로 기존의 신뢰도 예측 규격을 이용하여 수행하였다.
우리나라 무기체계 개발의 경우와 같이 충분한 수의 시제품을 대상으로 시험 및 평가가 이루어지기 어려운 환경에서는 시험 평가 기반의 신뢰도 성장 관리를 실행하기 어려우며, 이로 인해 체계의 야전 운용신뢰도 목표 값을 만족하지 못하는 경우가 종종 발생한다. 따라서 우리나라와 같은 환경에서는 이 연구에서 제시한 신뢰도 예측 기반 신뢰도 성장 관리 방안을 무기체계 개발의 시험 및 평가 이전 초기 개발 단계에서부터 설계 대안을 기반으로 체계에 적용하는 것이 현실적인 대안 중 하나라고 생각된다. 아울러 이 연구에서 제시한 신뢰도 예측 기반 신뢰도 성장 관리 방안은 개발 단계 별로 체계 신뢰도 예측을 통해 체계의 신뢰도 목표 값을 만족 여부를 확인하고 필요 시 체계 신뢰도 할당을 통해 신뢰도 관점에서 변경이 필요한 설계 부분을 제시한다. 이러한 신뢰도 예측과 할당을 포함하는 신뢰도 예측 기반 신뢰도 성장 관리는 시험 및 평가 단계의 시정조치 감소 및 비용 절감 효과와 더불어 체계 신뢰도 목표값 만족을 효율적으로 달성하는데 도움이 될 것으로 판단된다.
감시체계 적용 사례의 경우 실제로 신뢰도 예측 기반 신뢰도 성장 관리를 통해 많은 설계 변경이 이루어졌으며, 특히 신뢰도 성장 관리가 체계 개발의 진행과 동시에 이루어짐으로 인하여 과거에 종종 지연되어 비용을 발생시켰던 설계 변경 횟수가 감소하였고 이는 효율적인 체계 개발 효과로 이어졌다. 추후 진행될 감시체계의 개발 시험과 운용시험 및 야전 운용 단계에서 수집될 고장 데이터를 활용하여 신뢰도 예측 기반 신뢰도 성장 관리의 효과를 검증할 계획이며, 개발 단계에서 진행되는 다양한 신뢰성 시험 결과를 신뢰도 예측 기반 신뢰도 성장 관리에 반영하는 방안을 고려하고자 한다.